零知四轮小车入门版(零知mini主控)教程-程序控制电机开跑
本系列教程讲解零知小车套件以零知迷你板为主控,使用零知开源平台进行智能小车开发。
使用的硬件:零知智能小车套件
实现的功能:红外循迹、超声避障、直线运行等基本功能。
扩展:可以在小车上加入其它传感器模块进行扩展,比如加入摄像头模块进行监控、加入火焰传感器做灭火小车、加入更多超声波模块实现自动跟随...
本系列教程目录
零知四轮小车入门版(零知mini主控)系列教程-小车组装
零知四轮小车入门版(零知mini主控)系列教程-程序控制电机开跑
零知四轮小车入门版(零知mini主控)系列教程-红外循迹走S弯
零知四轮小车入门版(零知mini主控)系列教程-超声波自动避障
一、工具材料
(1)组装好的智能小车
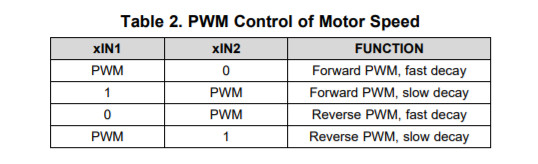
二、电机驱动说明
这里使用电机驱动为DRV8833型号,我们需要根据它的逻辑表来驱动电机:
三、程序代码
我们根据电机的驱动,使用PWM进行控制,程序如下:
/**********************************************************
* 文件: lzsmartcar_v1.ino by 零知实验室([url=http://www.lingzhilab.com]www.lingzhilab.com[/url])
* -^^- 零知开源,让电子制作变得更简单! -^^-
* 时间: 2019/11/20 15:50
* 说明: 零知智能小车-迷你板
************************************************************/
//调试信息
#define DEBUG_PRINT
/***************************************************************/
//引脚说明
//电机模块
#define MotorIN1 2
#define MotorIN2 3
#define MotorIN3 4
#define MotorIN4 5
#define MotorIN5 8
#define MotorIN6 9
#define MotorIN7 10
#define MotorIN8 11
/***************************************************************/
//小车运行方向
enum carDirec{
carForward = 1,
carBack,
carLeft,
carRight,
carStop
};
#define MotorSpeedRoSlow 140
#define MotorSpeedRoFast 100
#define MotorSpeedSlow 140
//避障,转弯速度调节
#define MotorSpeedNormal 140 //正常前进速度
#define MotorSpeedRotate 240
#define MotorSpeedFast 80
void motorRun(byte motorNum, bool forward, int speed){
//控制左前轮
if(motorNum == 1){
if(forward){
analogWrite(MotorIN1,255);
analogWrite(MotorIN2,speed);
}else{
analogWrite(MotorIN1,speed);
analogWrite(MotorIN2,255);
}
}
//控制右前轮
if(motorNum == 2){
if(forward){
analogWrite(MotorIN3,speed);
analogWrite(MotorIN4,255);
}else{
analogWrite(MotorIN3,255);
analogWrite(MotorIN4,speed);
}
}
//控制左后轮
if(motorNum == 3){
if(forward){
analogWrite(MotorIN5,255);
analogWrite(MotorIN6,speed);
}else{
analogWrite(MotorIN5,speed);
analogWrite(MotorIN6,255);
}
}
//控制右后轮
if(motorNum == 4){
if(forward){
analogWrite(MotorIN7,speed);
analogWrite(MotorIN8,255);
}else{
analogWrite(MotorIN7,255);
analogWrite(MotorIN8,speed);
}
}
}
void motorStop()
{
analogWrite(MotorIN1,255);
analogWrite(MotorIN2,255);
analogWrite(MotorIN3,255);
analogWrite(MotorIN4,255);
analogWrite(MotorIN5,255);
analogWrite(MotorIN6,255);
analogWrite(MotorIN7,255);
analogWrite(MotorIN8,255);
}
//小车根据命令运行
void carGo(byte cmd){
switch(cmd){
case carForward:
motorRun(1,true,MotorSpeedNormal);
motorRun(2,true,MotorSpeedNormal);
motorRun(3,true,MotorSpeedNormal);
motorRun(4,true,MotorSpeedNormal);
break;
case carBack:
motorRun(1,false,MotorSpeedNormal);
motorRun(2,false,MotorSpeedNormal);
motorRun(3,false,MotorSpeedNormal);
motorRun(4,false,MotorSpeedNormal);
break;
case carLeft:
motorRun(1,true,MotorSpeedRotate);
motorRun(2,true,MotorSpeedFast);
motorRun(3,true,MotorSpeedRotate);
motorRun(4,true,MotorSpeedFast);
break;
case carRight:
motorRun(1,true,MotorSpeedFast);
motorRun(2,true,MotorSpeedRotate);
motorRun(3,true,MotorSpeedFast);
motorRun(4,true,MotorSpeedRotate);
break;
case carStop:
motorStop();
break;
default:
motorStop();
break;
}
}
// 复位或上电后运行一次:
void setup() {
//在这里加入初始化相关代码,只运行一次:
//串口调试
Serial.begin(9600);
//设置引脚
pinMode(MotorIN1,OUTPUT);
pinMode(MotorIN2,OUTPUT);
pinMode(MotorIN3,OUTPUT);
pinMode(MotorIN4,OUTPUT);
pinMode(MotorIN5,OUTPUT);
pinMode(MotorIN6,OUTPUT);
pinMode(MotorIN7,OUTPUT);
pinMode(MotorIN8,OUTPUT);
carGo(carStop);
}
//一直循环执行:
void loop() {
if(Serial.available()){
char cmd = Serial.read();
//前进
if(cmd == '1'){
carGo(carForward);
}//左转
else if(cmd == '2'){
carGo(carLeft);
}//右转
else if(cmd == '3'){
carGo(carRight);
}//后退
else if(cmd == '4'){
carGo(carBack);
}//停车
else{
carGo(carStop);
}
}
}
将以上代码验证上传至小车,然后我们在串口调试窗口发送不同的命令,看小车是否按照我们预期的动作运转,如果有冲突是很正常的,因为有时候安装电机的方向不一样,这时候我们就可以根据实际情况修改上述代码,使之和我们安装好的小车运行情况一致。
小车车轮电机与扩展板接口的连接如下图所示:

图中的序号是程序中定义的车轮编号
若电机转是反方向转的,可以调换程序中对应车轮的以下部分代码:
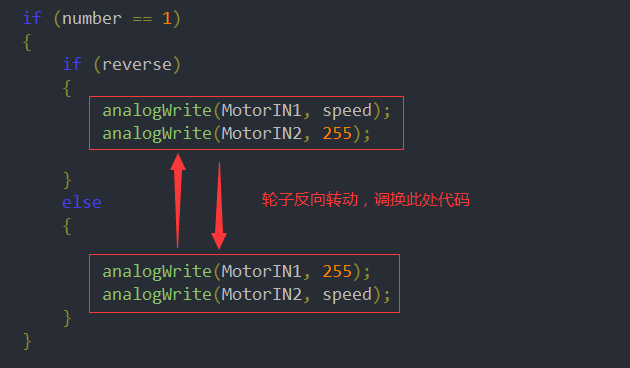
哪个车轮方向反了,在程序中调换哪个车轮的。