零知开源模块使用-MPU6050六轴 加速度+陀螺仪
本次演示MPU6050模块在我们零知平台上的应用,使用该模块测量三轴加速度和三轴陀螺仪数据。
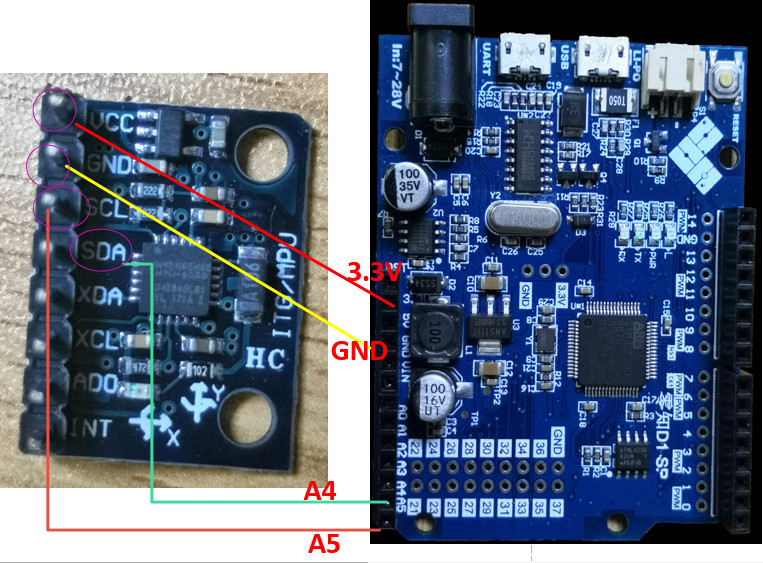
一、接线
模块的SCL和SDA分别与零知标准板的I2C接口连接即可,供电连接3.3v,其他脚默认。
二、代码
/* I2C interface MPU6050 demo
* powered by [url=http://www.lingzhilab.com]www.lingzhilab.com[/url]
*/
#include "MPU6050.h"
// 默认I2C地址为 0x68
// AD0 low = 0x68
// AD0 high = 0x69
MPU6050 accelgyro;
int16_t ax, ay, az;//三轴加速度值
int16_t gx, gy, gz;//三轴陀螺仪值
float nax,nay,naz;
float ngx,ngy,ngz;//转换后的实际值
#define LED_PIN LED_BUILTIN
bool blinkState = false;
void setup() {
Serial.begin(9600);
// MPU6050初始化设置
Serial.println("Initializing I2C devices...");
accelgyro.initialize();
// verify connection
Serial.println("Testing device connections...");
if(accelgyro.testConnection()){
Serial.println("MPU6050 connection successful");
}else{
Serial.println("MPU6050 connection failed");
}
//使用LED进行指示
pinMode(LED_PIN, OUTPUT);
// accelgyro.setFullScaleAccelRange(MPU6050_ACCEL_FS_16);//加速度参数
// accelgyro.setFullScaleGyroRange(MPU6050_GYRO_FS_500);//陀螺仪
}
void loop() {
// 获取原始的数值:三轴加速度值和三轴陀螺仪数值
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// 分别获取
//accelgyro.getAcceleration(&ax, &ay, &az);
//accelgyro.getRotation(&gx, &gy, &gz);
// 显示打印
Serial.print(" acc:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print("\t gyro:\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.println(gz);
//实际数值转换
accelgyro.readNormalizeAccel(&nax,&nay,&naz);
accelgyro.readNormalizeGyro(&ngx,&ngy,&ngz);
Serial.print("Normalize acc:\t");
Serial.print(nax); Serial.print("\t");
Serial.print(nay); Serial.print("\t");
Serial.print(naz); Serial.print("\t");
Serial.print("\t Normalize gyro:\t");
Serial.print(ngx); Serial.print("\t");
Serial.print(ngy); Serial.print("\t");
Serial.println(ngz);
// blink LED to indicate activity
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
delay(300);
}
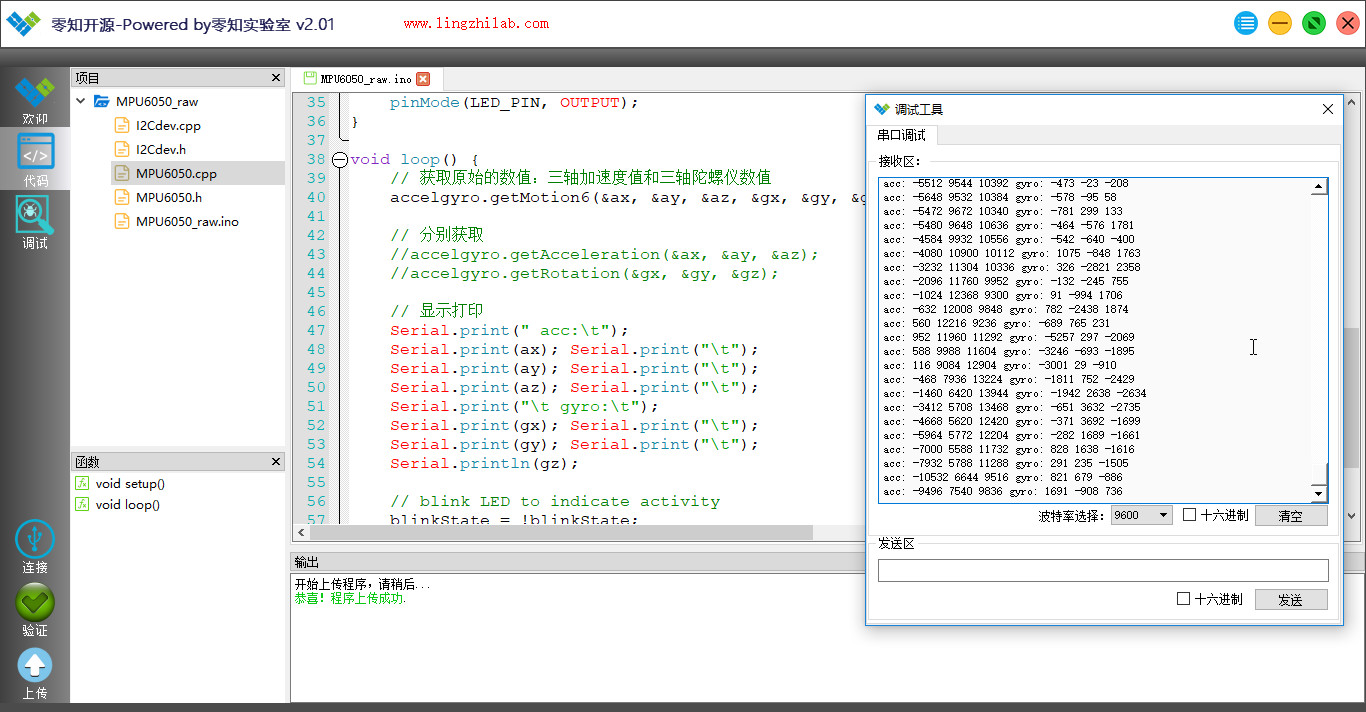
当我们读取到原始数值后需要进行转换才能得到实际的值,在上面代码已经做了转换,结果如下:

三、完整工程参考
MPU6050-DEMO1.zip(点击下载)